外観検査ロボットHS-IR 100
目視を凌駕する外観検査を実現
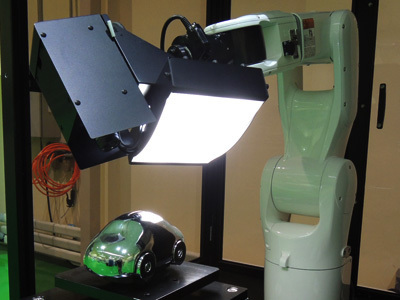
鏡面・曲面外観検査ロボット HS-IR 100 〜より正確に、よりスピーディーに〜
- 多関節ロボットが、ワーク曲面に合わせてカメラヘッドを最適ポジションに配置し、鏡面用に構成された光学系が微細な欠陥を捉え、画像処理ソフトが欠陥を抽出します。
- 携帯電話のケース等の小さい部品から自動車のドアサイズまで、形状を問わず検査が可能です。
多様な搬送ラインに対応し既存ラインへの組込みも可能
ユニットをライン(コンベアライン、目視検査ライン等、多様なライン)に直接導入が可能です。既存ラインへの組込も可能です。(後付方式)
検査性能
| 欠陥種 | 検出性能(目安) | 欠陥種 | 検出性能(目安) |
|---|---|---|---|
| キズ | 約 0.1mm 幅〜 | タレ | 段差 0.1mm〜 |
| ブツ(凹) | 約 Φ0.5mm〜 | 汚れ | 約 Φ0.5mm〜 |
| ヘコ(凸) | 約 Φ1.0mm〜 | シワ | 段差 0.1mm〜 |
| 打痕 | 約 Φ0.5mm〜 | – | – |
※カメラ30万画素、視野30mm x 40mmの場合
欠陥検出例-キズ検査例 1
塗装面の傷
 ワーク(塗装面)
ワーク(塗装面) カメラ画像
カメラ画像 欠陥検出画像
欠陥検出画像
欠陥検出例-キズ検査例 2
ガラス面の傷
 ワーク(ガラス面)
ワーク(ガラス面) カメラ画像
カメラ画像 欠陥検出画像
欠陥検出画像
検査風景

動画紹介
目視検査領域の自動化 これまで不可能とされた鏡面・曲面のワークを検査することが可能です。トレーサビリティシステムとしても利用可能。検査対象ワークは、鉄、アルミ、樹脂、メッキ製品など多岐にわたり対応が可能です。